Recent Gains from reading research papers[June 2nd]
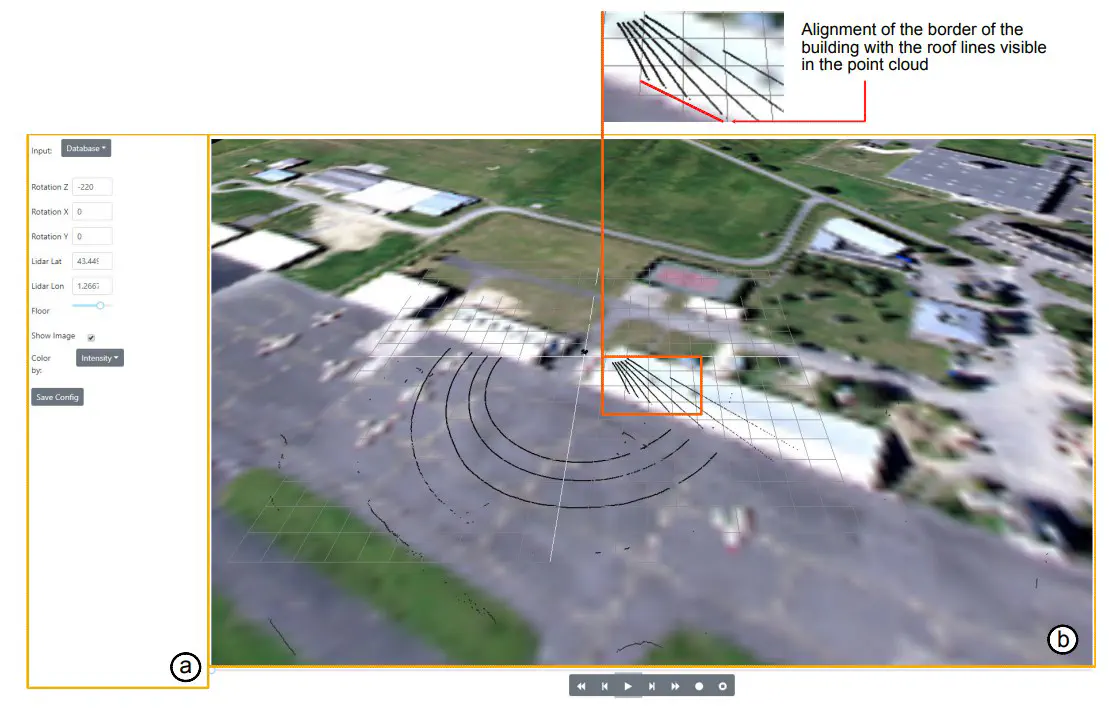 Image credit: Unsplash
Image credit: Unsplash
[1]Lobo M J, Hurter C, Cousy M. A LIDAR interactive data visualization for ground aircraft detection at small airports[C]//SID 2019, 9th SESAR Innovation Days. 2019.
The paper implements the interaction and visualization of LiDAR detection data for small airports, which is used in the ENVISION project to enable the detection and localization of aircraft, vehicles and people. The implementation process is mainly done by coupling multiple sensors and processing modules, i.e. multiple cameras, a LiDAR and an ADS-B sensor, in order to calculate the target position. The data acquired in the sensors are provided to separate processing modules, which decode and process their data. The processing results are then integrated into a data fusion module, which tracks the target, calculates the target position and generates aircraft motion events. The LIDAR is placed on a high pole about 8 meters high, thus covering part of the ramp and the nearest taxiway.
Note 1: The paper differs in that in order to achieve fast point cloud segmentation, it detects the 2D images generated by the LiDAR instead of in the 3D point cloud and uses a plane fitting method to ignore the interference of the ground point cloud. The method to determine if they are the same target is as follows: for each laser point not on the ground, four neighboring laser points are considered: the two horizontal nearest points from the same laser scan and the vertical nearest point with the same azimuth. This constructs a graph with up to four neighboring points for each point, depending on the distance between the points. For two points to be considered adjacent, the distance between them must be below a distance threshold. For each two neighboring points in the graph a beta angle is to be calculated, which is the angle between the line segment passing through the LIDAR origin and the farthest of the two neighboring points. This angle reflects the depth difference between the two points, and if this angle is small, it indicates that these points may be at different depths and belong to different objects, i.e., the β threshold is determined to determine whether the two laser points belong to the same object.
Note 2: The 2D detection method provided in this paper cannot detect people or small vehicles because it filters out objects with the longest diagonal less than 1 meter from the bounding box. This is because it is found in its experiments to produce more false detections if small targets are included, which is an area that can be improved. In addition, the algorithm cannot perform target classification to obtain the class information of the target, and this aspect requires further fusion of the information obtained by the camera and fusion.
Tianxiong Zhang
My research interests include Digital Twin, Computer Vision, Urban Air Mobility (UAM).