Recent Gains from reading research papers[Apr 12th]
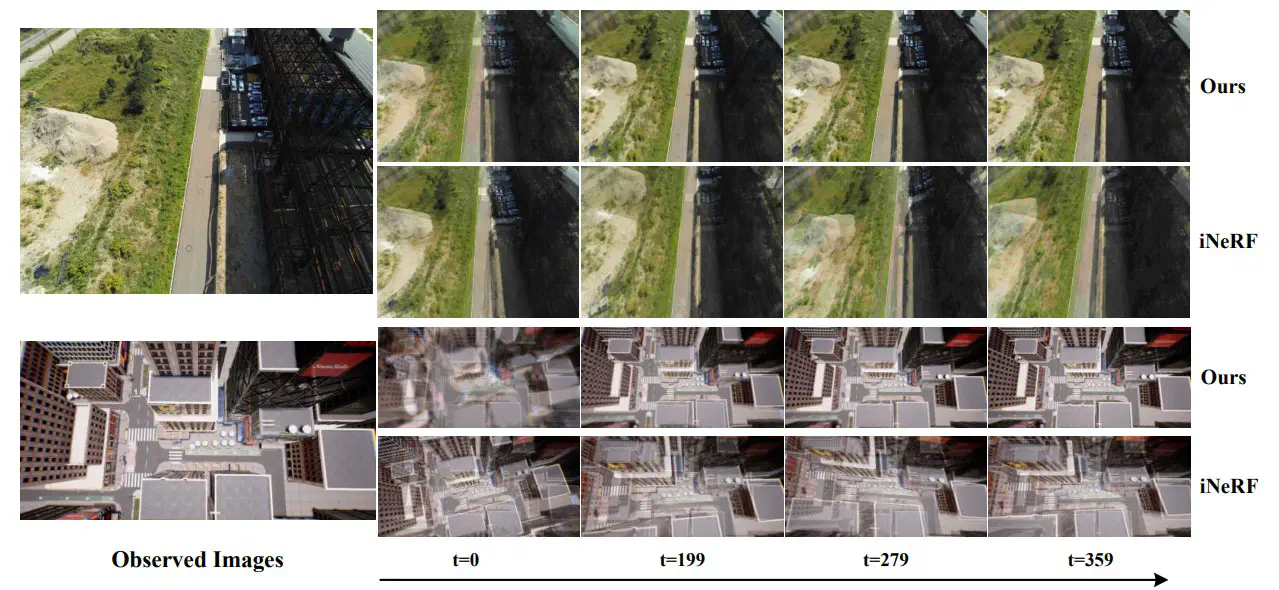 Image credit: Unsplash
Image credit: Unsplash
[1] Zhu Z, Chen Y, Wu Z, et al. Latitude: Robotic global localization with truncated dynamic low-pass filter in city-scale nerf[C]//2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023: 8326-8332.
Neural Radiance Fields (NeRF) have achieved significant success in representing complex 3D scenes; however, existing NeRF-based pose estimators are prone to local optima during the optimization process and lack initial pose prediction. To address these issues, the authors propose the LATITUDE method, which includes a two-stage localization mechanism: the first is a position recognition phase that provides initial global localization values by training a regressor; the second is a pose optimization phase that minimizes the residual between observed and rendered images by directly optimizing the pose on the tangent plane. To avoid local optima, the authors introduce a coarse-to-fine pose registration using TDLF.
Note 1: One of the core innovations of the article is the introduction of a two-stage global localization mechanism. In the position recognition phase, an initial global position estimate is provided by training a regressor based on NeRF. This approach leverages the large-scale image data generated by NeRF to provide reliable initial values for global localization. In the pose optimization phase, the pose is optimized on the tangent plane, achieving a coarse-to-fine adjustment of the pose, which helps to improve the accuracy of localization.
Note 2: Another innovation of the article is the introduction of TDLF to avoid local optima during the optimization process. TDLF applies a smooth mask to the positional encoding of NeRF during optimization, allowing for dynamic adjustment from non-zero to full across different frequency bands. This coarse-to-fine optimization strategy helps to avoid local optima caused by high-frequency information, ensuring the stability and accuracy of the optimization process.
Note 3: The method presented in the paper demonstrated high precision in experiments but did not discuss in detail its performance in real-time or near-real-time applications. Real-time capability is a critical factor for practical robotic navigation systems. Future work could focus on improving the computational efficiency of the algorithm. Moreover, the paper primarily focused on vision-based localization methods. In practical applications, combining data from multiple sensors could improve the accuracy and robustness of localization. Future work could explore how to effectively integrate data from different sensors to further enhance the performance of the system.
Tianxiong Zhang
My research interests include Digital Twin, Computer Vision, Urban Air Mobility (UAM).